Symulacja dla robotów, maszyn i automatyki
Od ich symulacji po programowanie offline i wirtualne uruchamianie

Szczegółowa symulacja robotów i maszyn

Statyczny CAD uruchomiony w modelu 3D

Jakościowe wyniki z symulacji

Przykłady, Visual Components w akcji
Symulacja robotów na wysokim poziomie
Symulacja różnych typów robotów
Visual Components posiada ponad 1000 predefiniowanych robotów, takich jak Kuka, ABB, Stäubli, Fanuc, Motoman, Kawasaki i wiele innych, a także umożliwia wstępne i wtórne przetwarzanie (import/eksport) dla istniejących programów robotów.
Oferuje ujednolicony interfejs programowania robotów dla wszystkich tych robotów. A jednocześnie może zapisać ten program dla wielu z tych robotów w sposób unikalny dla swojego typu.

Inne automaty i maszyny
Oprócz robotów jest wiele innych systemów w bibliotece kommponentów VC. Jeśli brakuje jakiegoś komponentu, może on zostać utworzony z pliku CAD. Ten komponent może mieć osie obrotowe lub liniowe.
Poza CAD element potrzebuje mechanizmu sterującego, który określi sposób jego działania.

Łatwe programowanie
Zarówno roboty, jak i wszystkie inne komponenty można zaprogramować wg uznania do danego układu. Wystarczy na przykład ustawić głowę robota w nowej pozycji, a następnie kliknąć myszką, przez co rejestruje się pozycję robota. Można tu również używać takich decyzji jak "if" lub "while". W ten sposób tworzy się kompletny program dla robota. Program ten może być następnie wyeksportowany również dla prawdziwego robota.

Sygnały i połączenie ze sterownikiem PLC
Dzięki VC możliwa jest cyfrowa koordynacja całych linii produkcyjnych oraz bezpośrednia analiza procesów i ich informacji.
VC łączy się z prawdziwym oprogramowaniem PLC, programowaniem robotów lub sterownikami sprzętowymi poprzez OPC UA, Profibus, Profinet, Simba, PLC Sim, TwinCAT (Beckhof) i wiele innych.

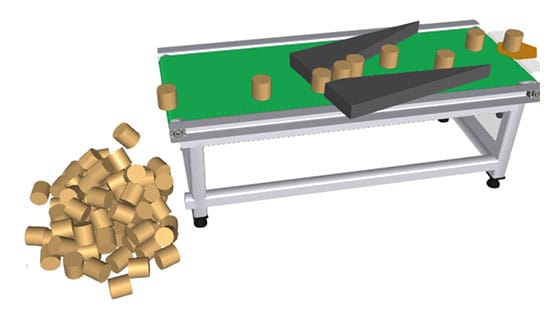
Fizyka
Komponentom można przypisać właściwości fizyczne, np. swobodny spadek, hamowanie i przyspieszanie, blokowanie lub spychanie przez inne objekty Zobacz, że cylindry spadają, układają się w stosy, są spuchane na rysunku boku.
Kolizje
"Możemy nie tylko sprawdzic kiedy dochodzi do kolizji dwóch komponentów ale też kiedy minimalna odległość pomiędzy nimi zostanie przekroczona, np. kiedy dwa roboty muszą pracować blisko siebie. Odległość jest stale monitorowana w przebiegu symulacji i wizualizowana za pomocą aktualnych danych. Jeśli odległość spadnie poniżej minimalnej odległości, symulacja zostanie zatrzymana, a element, którego dotyczy symulacja, zostanie podświetlony kolorem."

Korzyści z symulacji CAD
Wizualizacja rzeczywistości
VC importuje CAD bezpośrednio z formatów Step, Catia, SolidWorks, Unigrafics, AutoCAD, Parasolid, JTOpen, Iges, Igrip, 3D Studio, Sketchup, Rhino.
Geometrie, podział i osie obrotu
Po zaimportowaniu, geometrie CAD są upraszczane i dzielone na mniejsze, niezależne jednostki. Mogą one być następnie połączone ze sobą przegubami, które mogą być osiami obrotowymi lub liniowymi. Przeguby te mogą być programowane w celu uzyskania ich dokładnego zachowania w ruchu. Na przykład, można je zaprogramować za pomocą procedury kinematycznej, która steruje wszystkimi ramionami w robocie, dzięki czemu robot może osiągnąć określoną pozycję w przestrzeni.

3D PDF
VC może zapisać trójwymiarowy układ w trójwymiarowym pliku PDF (3D PDF) dla jeszcze łatwiejszej współpracy w ramach zespołu projektowego lub jako referencję dla klienta. Jak każdy plik pdf, również 3D PDF może być otwarty za pomocą popularnego programu Acrobat Reader.

Jakościowa ocena symulacji
Pełne wykorzystanie potencjału symulacji
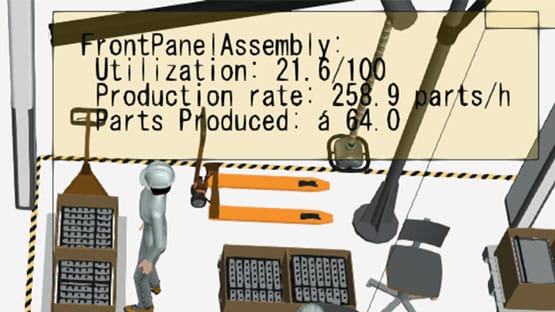
W Visual Components możliwe jest wyświetlanie wyników na różne sposoby. Statystyki dotyczące wykorzystania, tempa produkcji i wielkości produkcji są automatycznie zbierane przez komponenty i wizualizowane w modelu.
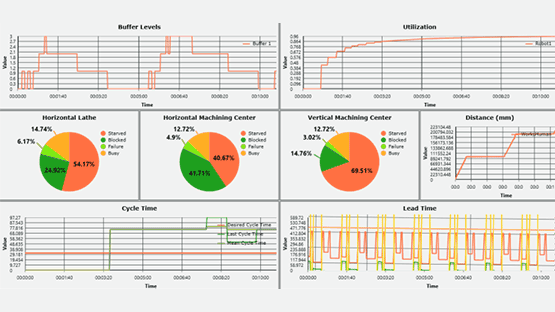
Pulpit wyników
Przebiegi i wyliczenia mogą być rejestrowane podczas trwania symulacji i równolegle wyświetlane na pulpicie. W ten sposób można pokazać ilości w buforze w czasie lub chwilowe ustwienie każdej osi w robocie. Dzięki temu można w prosty sposób zobaczyć, jak pracowały osie w robocie i która z nich jest najczęściej wykorzystywana. Przejrzyście skonstruowane tablice wyników pomagają zrozumieć złożone zależności w modelowanych systemach.
Przykłady modeli
Czy masz dalsze pytania dotyczące projektów symulacyjnych?
Powiedz nam jakie wymagania ma Twój projekt a my pomożemy Ci znaleźć dobre rozwiązanie aby go zrealizować.
PARTNERZY:

SimulateFirst Poland
ul. Powstańców Śląskich 5
PL 53-332 Wrocław
polska@simulatefirst.com
+48 75 6406434
SimulateFirst Germany
Anton-Graff-Str. 24
D-01309 Dresden
dresden@simulatefirst.com
+49 (0) 351 30906020