Symulacja logistyki w produkcji
Projekt
Wymiarowanie buforów, dopasowanie taśmociągów, miejsc przeładunkowych.
Rozwiązanie
Model symulacyjny stworzony za pomocą Simio do planowania codziennych operacji w zakładzie produkcyjnym. Wszystkie urządzenia dopasowane do wielkości aktualnych zamówień.
Właściwości
Animowane centrum przeładunkowe typu portal, ustawia pudełka na palecie, logistyka pełnych i pustych palet, użycie eksperymentów do zwymiarowania zasobów.
Symulacja zakładu produkcyjnego
Projekt
Optymalizowanie pracy maszyn pod bieżące zamówienia.
Rozwiązanie
Model symulacyjny stworzony za pomocą Simio do planowania codziennej produkcji. Porównanie wyników w eksperymentach i ich wizualizacja w dashboardach.
Właściwości
Jednoczesne porównanie wyników różnych wariantów w dashboardach. Np wielkości opóźnień wykonania zamówień pomiędzy róźnymi opcjami pracy maszyn.
Symulacja centrum rozładunkowego
Projekt
Identyfikacja wąskich gardeł w centrum rozładunkowwym.
Rozwiązanie
Model symulacyjny stworzony za pomocą Simio do planowania codziennych operacji w centrum rozładunkowym. Liczba pracowników i wózków widłowych może być określona z wyprzedzeniem w celu dopasowania do aktualnego obciążenia komisjonowania.
Właściwości
Animowane obiekty ze SketchUp, sortowanie listy zamówień, użycie eksperymentów do obliczenia ilości potrzebnych zasobów.
Dynamiczne wymiarowanie systemu magazynowego
Projekt
Weryfikacja konstrukcji i wymiarowanie magazynu.
Rozwiązanie
Model symulacyjny stworzony w Simio. Elastyczne dostosowywanie wszystkich obiektów w układzie. Testowanie ostatecznej wersji magazynu przed rozpoczęciem jego budowy.
Właściwości
Testowanie proporcji rozmiarów magazynu w zależności od ilości palet. Równoczesna analiza symulacji i wykorzystania zasobów w liczbach i na wykresach.
Symulacja magazynu wysokoregałowego
Projekt
Wymiarowanie z określeniem liczby rzędów i pięter, testowanie strategii załadunku lub rozładunku w magazynie.
Rozwiązanie
Model symulacyjny stworzony z wykorzystaniem Simio. Dane wejściowe do modelu to bieżące zasoby oraz planowanie zamówień dostaw i wysyłek.
Właściwości
Elastyczne ramy zautomatyzowanego systemu pobierania towarów (ASRS = Automated Storage Retrieval System) pozwalają na budowę magazynu z wymaganą ilością półek i rzędów. Dokładne ruchy w korytarzu. Użycie dynamicznej reguły w celu znalezienia najlepszej półki na paletę.
Symulacja AGVs w liniach produkcyjnych
Projekt
Ustalenie optymalnego wykorzystania i liczby AGV do zasilania linii montażowych w celu podjęcia decyzji inwestycyjnej.
Rozwiązanie
Model symulacyjny stworzony z wykorzystaniem Simio. Liczba AGV i ich prędkość jest analizowana za pomocą eksperymentów Simio.
Właściwości
Animacja obiektów z programu SketchUp, automatyczne przypisanie AGV do zadania. AGVs dostarczają pełny ładunek, następnie pobierają pusty ładunek i jadą do strefy załadunku.
Pobieranie i wydawanie palet w zautomatyzowanym systemie magazynowania towarów z użyciem AGVs
Projekt
Ustalenie liczby, prędkości i ruchów pojazdów AGV dla skalowalnego magazynu z ASRS.
Rozwiązanie
Model symulacyjny stworzony z użyciem Simio. Użycie symulacji SimulateFirst do modelowania magazynu za pomocą ASRS. Elastyczna sieć AGVs pozwala na dokładną kontrolę ich ruchu.
Właściwości
Wprowadzanie i wyprowadzanie AGV z hali załadunkowej i wyładunkowej. Stacje przepakowujące pobierają i wysyłają palety z powrotem do magazynu.
Sterowanie dostawą materiałów za pomocą AGV
Projekt
Symulacja ruchów AGV w celu zapewnienia ciągłego dopływu materiałów dla wszystkich obszarów roboczych.
Rozwiązanie
Model symulacyjny stworzony za pomocą programu Visual Components. Pojazdy AGV z systemem CAD i logiką przypominają dokładnie roboty mobilne firmy Omron.
Właściwości
Logika pojazdów AGV firmy Omron zintegrowana, rejestracja tras na pojazdy AGV, przydzielanie kontenerów ze stacji paliw do obszarów roboczych.
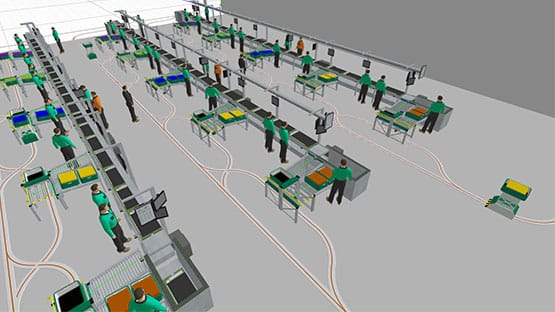
Codzienne planowanie kompletnej produkcji seryjnej
Projekt
Symulacja sterowanych danymi stanowisk obróbczych dla małych części samochodowych. Alternatywne obłożenie obiektów, linii montażowych, produkcji z paletami i buforami.
Rozwiązanie
Model symulacji 3D z użyciem Simio. Analizy buforów, korków, czasu oczekiwania, wykorzystania zasobów.
Właściwości
Inicjalizacja na podstawie bieżących danych, alternatywne stanowiska pracy dla danego zadania, wykorzystanie przepływów do reprezentacji części samochodowych, interaktywne analizy.
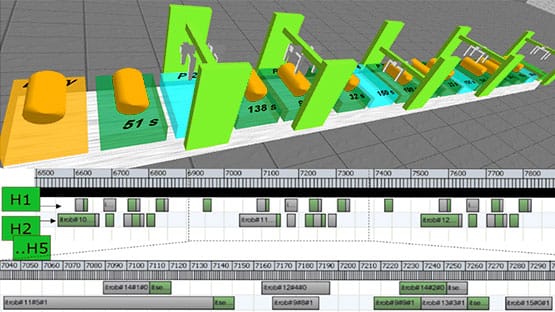
Analiza czasu cyklu i symulacja pracy robota
Projekt
Symulacja zautomatyzowanej linii produkcyjnej z różnymi rodzajami produktów o różnym czasie przetwarzania w celu optymalizacji czasu cyklu i zwiększenia wykorzystania linii.
Rozwiązanie
Model symulacji robota w Simio. Szybkie analizy ujawniają możliwe opóźnienia w cyklu z powodu niewłaściwej kolejności części.
Właściwości
Symulacja robota w Simio, tabele wyników, czas cyklu dla każdej jednostki roboczej, sekwencja stacji oparta na danych.
Planowanie produkcji, wielkość partii 1
Projekt
Planowanie i symulacja systemu produkcyjnego o wielkości partii 1. Inna aplikacja użytkownika utrzymuje codzienne dane produkcyjne. Simio importuje je i wysyła wyniki z powrotem do aplikacji.
Rozwiązanie
Stworzenie aplikacji użytkownika w środowisku .NET i Access, przechowującej dane w centralnym serwerze SQL.
Właściwości
Simio łączy się z serwerem SQL, Simio współpracuje z aplikacją użytkownika, produkcja o wielkości partii 1.
Konsultacje z wykorzystaniem modelu symulacyjnego
Projekt
Przekonywanie decydentów o jakości proponowanego systemu automatyzacji. Elastyczny model pozwala na interaktywne dopasowywanie systemu nawet podczas spotkania.
Rozwiązanie
Szybki model z eksperymentami, który symuluje, wizualizuje i analizuje przepływ produkcji w ciągu kilku sekund.
Właściwości
Szybkie i interaktywne analizy KPI, wykorzystanie eksperymentów.
Wirtualne uruchomienie kontrolera
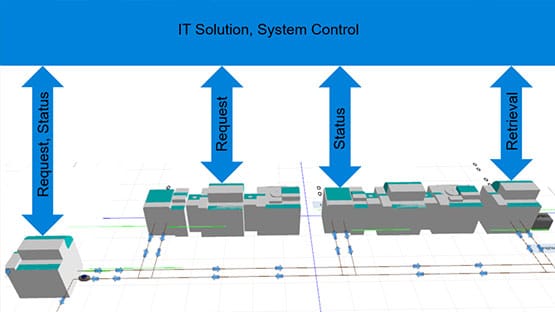
Projekt
Wczesna walidacja systemu kontroli przy obciążeniu. Model symulacyjny otrzymuje zgłoszenia i odpowiedzi od sterownika, a następnie po każdym etapie produkcji odsyła komunikaty o statusie.
Rozwiązanie
Model wbudowany w Simio plus AddOn w .NET pozwala na ciągłą komunikację ze sterownikiem poprzez TCP/IP.
Właściwości
Simio działa w czasie rzeczywistym; AddOn odbiera komunikaty od kontrolera i przekazuje je do uruchomionego modelu.
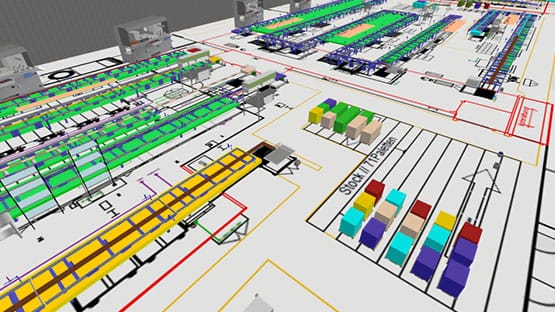
Symulacja kompletnego zakładu
Projekt
Elastyczne rozwiązanie modelowania dla kompletnego zakładu z zamówieniami, zasobami, pracownikami, magazynami, środkami transportu (również AGV lub AMHS).
Rozwiązanie
Opracowany jeszcze przed Simio w programie Enterprise Dynamics w celu stworzenia cyfrowego bliźniaka systemu produkcyjnego i logistycznego.
Właściwości
Projektowanie modeli na podstawie danych w ED, wysoko sparametryzowane modelowanie z dobrą animacją.
Zwiększenie szybkości i przepustowości robotów delta
Projekt
Model symulacyjny z robotami delta zbierającymi ciasteczka. Koordynacja zadania selekcji ciasteczek pomiędzy robotami.
Rozwiązanie
Model symulacyjny stworzony za pomocą programu Visual Components. Dzięki dynamicznym algorytmom możliwe było osiągnięcie wyższej prędkości wybierania i zmniejszenie liczby potrzebnych robotów.
Właściwości
Roboty Delta przekazują sobie nawzajem wiadomości, aby dać znać, który z herbatników zostanie wybrany przez którego robota.
Symulacja robota
Projekt
Symulacja sposobu, w jaki różne typy robotów współpracują ze sobą i ich koordynacja.
Rozwiązanie
Model symulacyjny stworzony za pomocą Visual Components. Funkcje robotów stają się wyraźnie określone.
Właściwości
Ponad 1000 predefiniowanych robotów takich jak Kuka, ABB, Stäubli, Fanuc, Motoman, Kawassaki może być zintegrowanych; Eksportowane jako 3D PDF.
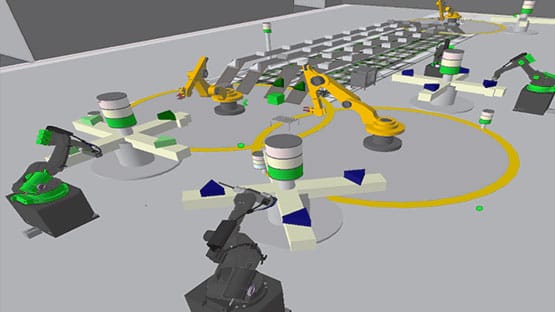
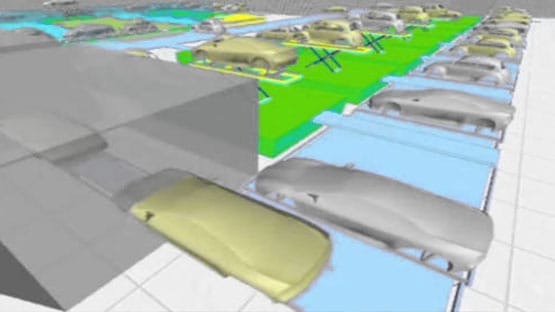
Zoptymalizowane plany operacyjne weryfikowane za pomocą symulacji
Projekt
Łączymy matematyczną optymalizację procesów z symulacją 3D. Przebieg procesu, który jest obliczany niemal optymalnie, ale z niewielką możliwością odchyleń, jest dynamicznie testowany pod kątem różnych zakłóceń w modelu symulacyjnym. Pozwala to na udzielenie odpowiedzi na aktualne pytania "co jeśli?" i aktualizację algorytmów optymalizacyjnych i planów produkcji zanim zostaną one przekazane do rzeczywistych systemów.
Na zdjęciu przedstawiono automatyczny system z robotami manipulacyjnymi, które przemieszczają produkty jeden po drugim. Istotne było zachowanie krótkich tolerancji czasowych na każdym stanowisku z jednej strony i zwiększenie liczby części w trakcie obróbki z drugiej strony.
Planowanie ruchu we Freiburgu
Projekt
Niektóre specyficzne węzły we Freiburgu powodują długi czas oczekiwania. Należy przeanalizować czas cyklu sygnalizacji świetlnej i alternatywne trasy przekierowania.
Rozwiązanie
Model sieci drogowej z odpowiednim ruchem. Dodano liczbę pojazdów i czasy cyklu.
Właściwości
Możliwa kontrola czasu trwania cyklu, widoczność sygnalizacji świetlnej, zintegrowane pulpity do przeprowadzania analiz, szybki i dostępny w każdej chwili wpływ na czas oczekiwania.
Planowanie pracy sieci kolejowej
Projekt
Określić czas trwania cyklu w pociągach, który optymalnie wykorzystuje się w zależności od zapotrzebowania. Scenariusze z większą liczbą pociągów, krótszym czasem trwania cyklu i bezpieczną eksploatacją przystanków.
Rozwiązanie
Sieć kolejowa utworzona zgodnie z układem. Pociągi wyposażone w siedzenia i miejsca stojące. Liczba pociągów i odległości, z którymi można jeździć, są elastyczne.
Właściwości
Zawracanie na okrągło, bez kolizji, zachowując odległość między pociągami w każdej chwili.
Koordynacja AGVs na linii produkcyjnej

Projekt
Symulacja ruchów prowadnic AGV. Brak rezerwacji podwójnego zamówienia, AGV dostarczają i pobierają towary na czas.
Rozwiązanie
Model symulacyjny stworzony z Simio. Liczba pojazdów AGV i ich prędkość jest analizowana za pomocą eksperymentów Simio. Nie ma braków pudełek, nie ma straty czasu ani ruchów.
Właściwości
Obiekty animowane z programu SketchUp, automatyczne przypisanie AGV do zadania, AGV dostarczają pełny karton, następnie pobierają pusty karton i jadą do strefy załadunku, w tym również uwzględniony jest czas oczekiwania.
Symulacja stanowisk pracy z wieloma robotami

Projekt
Wykrywanie błędów, zastojów i kolizji w zautomatyzowanym systemie, a także nieefektywnych procesów na wczesnym etapie i testowanie usprawnień.
Rozwiązanie
Symulacja robotów za pomocą programu Visual Components, w tym programowanie offline wielu robotów, testowanie kolizji.
Właściwości
Programowanie robotów w trybie offline, sprawdzanie kolejności robotów pod kątem kolizji, skrócenie czasu taktu.
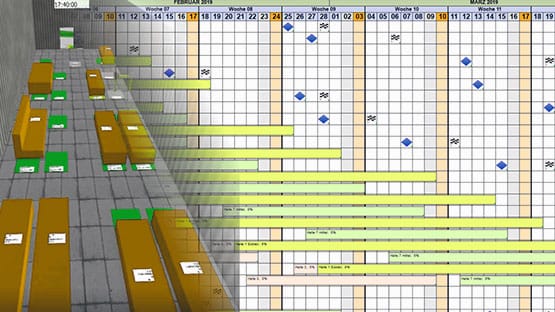
Bilansowanie przepływu produkcji
Projekt
Cyfrowy bliźniak powierzchni montażowej u producenta samochodów dla ciągłej poprawy przepływu produkcji i jak najwcześniejszego zwiększenia przepustowości w celu zaoszczędzenia kosztów.
Rozwiązanie
Cyfrowy bliźniak w Simio, z importem danych dla potrzeb produktu, routingu, WIP i planu produkcji, analizy KPI.
Właściwości
Relacyjna struktura danych, aktualizacja modelu na początku, wyniki wyjściowe przedstawione jako wykresy Gantta i pulpity nawigacyjne.
Kompletny montaż z ASRS i robotyką
Projekt
Symulacja wielu stanowisk obróbczych, ASRS; pracowników, buforów i robotów w celu zilustrowania etapów procesu i środowiska projektu.
Rozwiązanie
Trójwymiarowy model symulacyjny stworzony za pomocą Visual Components. Analiza stref zagrożenia, zatorów i kolizji.
Właściwości
Szczegółowa symulacja wielu typów robotów w jednym systemie (patrz również symulacja robotów).
Czy masz dalsze pytania dotyczące projektów symulacyjnych?
Powiedz nam jakie wymagania ma Twój projekt a my pomożemy Ci znaleźć dobre rozwiązanie aby go zrealizować.
PARTNERZY:

SimulateFirst Poland
ul. Powstańców Śląskich 5
PL 53-332 Wrocław
polska@simulatefirst.com
+48 75 6406434
SimulateFirst Germany
Anton-Graff-Str. 24
D-01309 Dresden
dresden@simulatefirst.com
+49 (0) 351 30906020